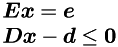
Objective function:

Constraints:
Define the new objective function as the sum of the old one and logarithmic barrier function:

Approximation of  near some feasible point
near some feasible point  :
:

where

KKT system:

Solution of the KKT system:

We can find  using Cholesky decomposition and then determine the descent direction. Since approximation of is used, we have to resolve the system until
using Cholesky decomposition and then determine the descent direction. Since approximation of is used, we have to resolve the system until  or feasible step size is small enough.
or feasible step size is small enough.
