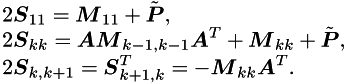
In order to solve KKT system we have to form Schur complement:
![$\\ \mbm{S} = \frac{1}{2}\mbm{E}\mbm{H}^{-1}\mbm{E}^T = \frac{1}{2}\left[\begin{array}{cc}\bar{\mbm{E}}_c \tilde{\mbm{E}}_u\end{array}\right] \left[\begin{array}{cc}\tilde{\mbm{H}}_c & \mbm{0} \\ \mbm{0} & \mbm{H}_u\end{array}\right] \left[\begin{array}{c}\bar{\mbm{E}}_c^T \\ \tilde{\mbm{E}}_u^T \end{array}\right] = \frac{1}{2}\bar{\mbm{E}}_c\tilde{\mbm{H}}_c^{-1}\bar{\mbm{E}}_c^T + \frac{1}{2}\tilde{\mbm{E}}_u\mbm{H}_u^{-1}\tilde{\mbm{E}}_u^T. $](form_37.png)
For  we have.
we have.
![$\\ \tilde{\mbm{H}}_c^{-1}\bar{\mbm{E}}_c^T = \left[ \begin{array}{ccccc} \tilde{\mbm{Q}}^{-1} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \tilde{\mbm{Q}}^{-1} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \tilde{\mbm{Q}}^{-1} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{Q}}^{-1} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{Q}}^{-1} \end{array} \right] \left[ \begin{array}{ccccc} -\bar{\mbm{R}}_1^T & \bar{\mbm{R}}_1^T\mbm{A}^T & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & -\bar{\mbm{R}}_2^T & \bar{\mbm{R}}_2^T\mbm{A}^T & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & -\bar{\mbm{R}}_3^T & \bar{\mbm{R}}_3^T\mbm{A}^T & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & -\bar{\mbm{R}}_4^T & \bar{\mbm{R}}_4^T\mbm{A}^T \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & -\bar{\mbm{R}}_5^T \\ \end{array} \right] \\ = \left[ \begin{array}{ccccc} -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T\mbm{A}^T & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T\mbm{A}^T & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T\mbm{A}^T & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T\mbm{A}^T \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_5^T \end{array} \right] $](form_38.png)
![$ \bar{\mbm{E}}_c\tilde{\mbm{H}}_c^{-1}\bar{\mbm{E}}_c^T = \\ = \left[ \begin{array}{ccccc} -\bar{\mbm{R}}_1 & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{A}\bar{\mbm{R}}_1 & -\bar{\mbm{R}}_2 & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{A}\bar{\mbm{R}}_2 & -\bar{\mbm{R}}_3 & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{A}\bar{\mbm{R}}_3 & -\bar{\mbm{R}}_4 & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{A}\bar{\mbm{R}}_4 & -\bar{\mbm{R}}_5 \\ \end{array} \right] \left[ \begin{array}{ccccc} -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T\mbm{A}^T & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T\mbm{A}^T & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T\mbm{A}^T & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T & \tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T\mbm{A}^T \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & -\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_5^T \end{array} \right]\\ = \left[ \begin{array}{ccccc} \bar{\mbm{R}}_1\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T & -\bar{\mbm{R}}_1\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T\mbm{A}^T & \mbm{0} & \mbm{0} & \mbm{0} \\ -\mbm{A}\bar{\mbm{R}}_1\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T & \mbm{A}\bar{\mbm{R}}_1\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_1^T\mbm{A}^T + \bar{\mbm{R}}_2\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T & -\bar{\mbm{R}}_2\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T\mbm{A}^T & \mbm{0} & \mbm{0} \\ \mbm{0} & -\mbm{A}\bar{\mbm{R}}_2\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T & \mbm{A}\bar{\mbm{R}}_2\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_2^T\mbm{A}^T + \bar{\mbm{R}}_3\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T & -\bar{\mbm{R}}_3\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T\mbm{A}^T & \mbm{0} \\ \mbm{0} & \mbm{0} & -\mbm{A}\bar{\mbm{R}}_3\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T & \mbm{A}\bar{\mbm{R}}_3\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_3^T\mbm{A}^T + \bar{\mbm{R}}_4\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T & -\bar{\mbm{R}}_4\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T\mbm{A}^T \\ \mbm{0} & \mbm{0} & \mbm{0} & -\mbm{A}\bar{\mbm{R}}_4\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T & \mbm{A}\bar{\mbm{R}}_4\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_4^T\mbm{A}^T + \bar{\mbm{R}}_5\tilde{\mbm{Q}}^{-1}\bar{\mbm{R}}_5^T \end{array} \right] \\ = \left[ \begin{array}{ccccc} \mbm{M}_{11} & -\mbm{M}_{11}\mbm{A}^T & \mbm{0} & \mbm{0} & \mbm{0} \\ -\mbm{A}\mbm{M}_{11} & \mbm{A}\mbm{M}_{11}\mbm{A}^T + \mbm{M}_{22} & -\mbm{M}_{22}\mbm{A}^T & \mbm{0} & \mbm{0} \\ \mbm{0} & -\mbm{A}\mbm{M}_{22} & \mbm{A}\mbm{M}_{22}\mbm{A}^T + \mbm{M}_{33} & -\mbm{M}_{33}\mbm{A}^T & \mbm{0} \\ \mbm{0} & \mbm{0} & -\mbm{A}\mbm{M}_{33} & \mbm{A}\mbm{M}_{33}\mbm{A}^T + \mbm{M}_{44} & -\mbm{M}_{44}\mbm{A}^T \\ \mbm{0} & \mbm{0} & \mbm{0} & -\mbm{A}\mbm{M}_{44} & \mbm{A}\mbm{M}_{44}\mbm{A}^T + \mbm{M}_{55} \end{array} \right], $](form_39.png)
where  (due to the special structure of
(due to the special structure of  and
and  ), this is not true if logarithmic barrier is added to the objective see 'Schur complement (IP method)'.
), this is not true if logarithmic barrier is added to the objective see 'Schur complement (IP method)'.
![$\\ \tilde{\mbm{E}}_u\mbm{H}_u^{-1}\tilde{\mbm{E}}_u^T = \left[ \begin{array}{ccccc} \tilde{\mbm{B}} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \tilde{\mbm{B}} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \tilde{\mbm{B}} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}}\\ \end{array} \right] \left[ \begin{array}{ccccc} \mbm{P}^{-1} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{P}^{-1} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{P}^{-1} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{P}^{-1} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{P}^{-1} \end{array} \right] \left[ \begin{array}{ccccc} \tilde{\mbm{B}}^T & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \tilde{\mbm{B}}^T & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \tilde{\mbm{B}}^T & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}}^T & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}}^T\\ \end{array} \right] \\ =\left[ \begin{array}{ccccc} \tilde{\mbm{P}} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \tilde{\mbm{P}} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \tilde{\mbm{P}} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{P}} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{P}}\\ \end{array} \right], $](form_43.png)
where  .
.
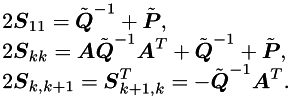
Hence, the matrix  is constant (if
is constant (if  and
and  do not change).
do not change).
